




ISEN Robotics >> Tutoriaux >> Installation de MPLAB et premiers pas avec un PIC >> Installation de MPLAB
Site officiel : http://www.microchip.com
Lien de téléchargement : http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en010014

Pour créer un nouveau projet, il faut se rendre dans le menu Project, puis Project Wizard.
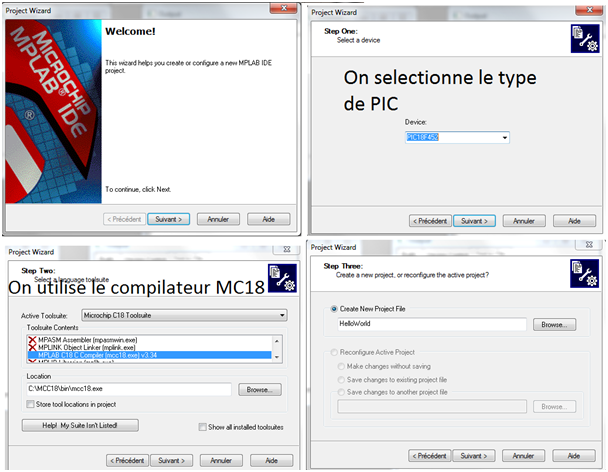

Vous devez arriver à la fenêtre suivante :

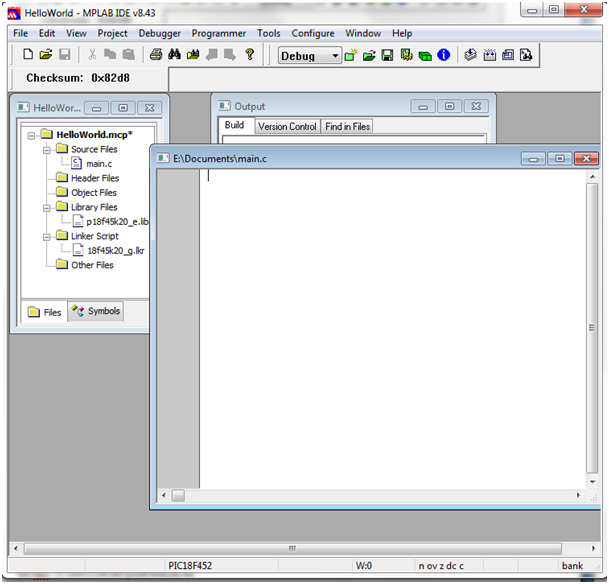
Si tout va bien vous devriez vous retrouver avec cet écran :
Installation de MPLAB et premiers pas avec un PIC
-(le 28/01/2010)
Installation de MPLAB
a. Téléchargement
Site officiel : http://www.microchip.com
Lien de téléchargement : http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=1406&dDocName=en010014
Créez un compte et téléchargez :
http://ww1.microchip.com/downloads/en/DeviceDoc/MPLAB_8_43.zip
MPLAB C for PIC18 v3.34 in LITE mode
http://ww1.microchip.com/downloads/en/DeviceDoc/MPLAB_8_43.zip
MPLAB C for PIC18 v3.34 in LITE mode
Une fois les deux softwares installés, il ne nous reste plus qu’à lancer MPLAB (icône rouge sur votre bureau).
b. Configuration
Lorsque l’on lance MPLAB on obtient l’écran suivant :
Pour créer un nouveau projet, il faut se rendre dans le menu Project, puis Project Wizard.
Puis on clique sur Suivant puis sur Terminer.
Vous devez arriver à la fenêtre suivante :
Il faut maintenant compléter les fichiers du projet. Pour que le logiciel puisse communiquer et programmer le PIC, il faut lui renseigner « un linker », ainsi que les différentes librairies à utiliser, et les fichiers Header. Bien évidement, il faudra ajouter un fichier source qui comportera le code de notre programme.
Le linker : C:\MCC18\bin\LKR\18f44k20_g.lkr
les libs : C:\MCC18\lib\p18F45K20.lib
Le linker : C:\MCC18\bin\LKR\18f44k20_g.lkr
les libs : C:\MCC18\lib\p18F45K20.lib
Puis faites File -> New , une fenêtre s’ouvre puis refaite File -> Save As et enregistrez le avec le nom de ce que vous souhaitez sans oublier l’extension « .c ».
Ensuite, allez sur Sources Files dans le « file manager » et ajouter les fichiers correspondant à l’aide du clic droit.
Ensuite, allez sur Sources Files dans le « file manager » et ajouter les fichiers correspondant à l’aide du clic droit.
Si tout va bien vous devriez vous retrouver avec cet écran :












